
Qu'est-ce qui fait qu'une mouche vole sans encombre, en évitant les crashs ? En élucidant le mécanisme de pilotage de la mouche, des chercheurs du CNRS ont construit un mini-hélicoptère pouvant se déplacer sans radar ni altimètre.
Pilotage automatique

Regarder les mouches voler, c'est parfois instructif... Au terme de vingt ans d'observations et d'études, une équipe du laboratoire Mouvement et Perception (CNRS/université de la Méditerranée) vient de déposer un brevet international sur le « pilote automatique de la mouche ». A partir d'un robot inspiré du vol de l'insecte, les chercheurs ont découvert qu'un automatisme permettait au diptère de naviguer correctement sans mesurer ni sa vitesse ni son altitude. L'intérêt de cette découverte* est double : elle permet de comprendre le fonctionnement des insectes tout en ouvrant des perspectives de développement en aéronautique.
* Franceschini, N., Ruffier, F., Serres, J. (2007) A bio-inspired flying robot sheds light on insect piloting abilities, Current Biology 17, 329-335 (February 20th)
De l'observation de la mouche...

Tout comme l'être humain, la mouche se guide grâce à ses deux yeux. Les 48 000 cellules photo-sensibles qui forment sa mosaïque rétinienne transmettent des signaux électriques au réseau neuronal qui les traite. On a longtemps imaginé que différents neurones mesuraient différentes grandeurs (altitude, vitesse de croisière, de descente, …).
« En fait, la mouche n'utilise aucun des capteurs traditionnels inventés par l'homme : altimètre, GPS, radar Doppler, etc. Il semblerait bien qu'elle n'utilise qu'un seul type de capteur, les neurones détecteurs de mouvement », explique Nicolas Franceschini, directeur de l'équipe biorobotique du CNRS. Ces neurones captent la vitesse de défilement des images du sol sur la rétine de l'animal au cours de son déplacement. Ce défilement, dit « flux optique », est mathématiquement égal à la vitesse de la mouche divisée par son altitude.
Par un automatisme que les chercheurs ont appelé « régulateur de flux optique », la mouche veille à conserver ce flux constant : elle ajuste automatiquement son altitude à sa vitesse. Cette thèse rend compte de comportements souvent décrits chez les insectes mais restés jusqu'ici inexpliqués. Par exemple, elle permet de comprendre pourquoi l'insecte réduit son altitude par vent de face : freiné par les courants aériens, il est contraint de descendre pour maintenir son flux optique constant. A l'inverse, un vent arrière, qui accélère sa course, le conduit automatiquement à s'élever dans les airs.
... au circuit électronique
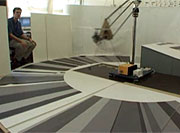
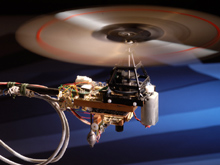
Les chercheurs ont confirmé cette thèse en transposant le principe de fonctionnement du capteur biologique (neurone détecteur de mouvement) sur un circuit électronique. Ne pesant que 0,2 gramme et ne mesurant que 7x7mm, le microcircuit a été placé sur un mini-hélicoptère nommé Octave, dans sa partie ventrale, afin qu'il fixe en permanence le sol et capte le flux optique. Les expériences ont montré que le robot se pilote lui-même au gré de ce qu'il voit au sol et atterrit en douceur quels que soient les aléas. Il se comporte comme la mouche.
« Ce travail nous a permis, en biologie, d'établir un schéma du guidage visiomoteur des insectes et, en robotique, de proposer un nouveau capteur sensoriel et un principe de guidage de véhicule aérien basé sur la vision », résume Nicolas Franceschini.
Diverses applications
Ce circuit vient d'être breveté par les chercheurs. Et pour cause : « Il permet de s'affranchir de l'altimètre et du radar, instruments lourds, onéreux et gourmands en énergie ». De quoi séduire le secteur de l'aéronautique. D'ailleurs, l'équipe du CNRS est en discussion avec Eurocopter, le premier fabricant d'hélicoptères au monde, intéressé par la sécurité supplémentaire qu'apporterait ce type de pilote automatique lors de manœuvres délicates.
Autre domaine d'applications potentielles, le bâtiment. « L'inspection des barrages, tabliers de pont, et autres ouvrages difficiles d'accès commence à se faire au moyen de mini-robots aériens. Les doter d'une avionique plus légère et d'une certaine autonomie est essentiel », explique Nicolas Franceschini. Pour l'instant, le système mis au point ne permet pas une complète autonomie d'Octave. Le robot-démonstrateur est fixé à une sorte de canne à pêche, reliée à un poteau central, autour duquel il tournoie. « Il s'agit d'un robot captif ; il n'est autonome que dans le plan vertical, où il peut monter, descendre, avancer et basculer en avant, il faudra au moins une dizaine d'années pour le rendre totalement autonome. Mais nous veillerons à brider son libre arbitre ! ».